
COMPUTER VISION ACCURACY AND DRAGONFLY'S PRECISION
Dragonfly uses computer vision to provide the accurate location of forklifts, robots, AMR, AGV, drones and other moving assets. But there are two different types of accuracy and precision to consider when talking about computer vision
ACCURACY INSIDE MAPPED VENUES

When navigating inside a known environment (when Dragonfly relocates the device inside a venue already mapped), the accuracy depends on the precision of the triangulation of known points detected (a.k.a. features). The radius of confidence, is typically within 10 cm, and depends on several factors, including:
- The quality of the camera;
- The quality of the one-time camera calibration process;
- The quality of the one-time mapping process;
- The quality of the one-time geo-referencing process;
- The type of the environment:
- lighting;
- amount of objects/real-world reference (and thus features);
- availability/type of textures;
- dimension of the map.
ACCURACY INSIDE UN-MAPPED VENUES
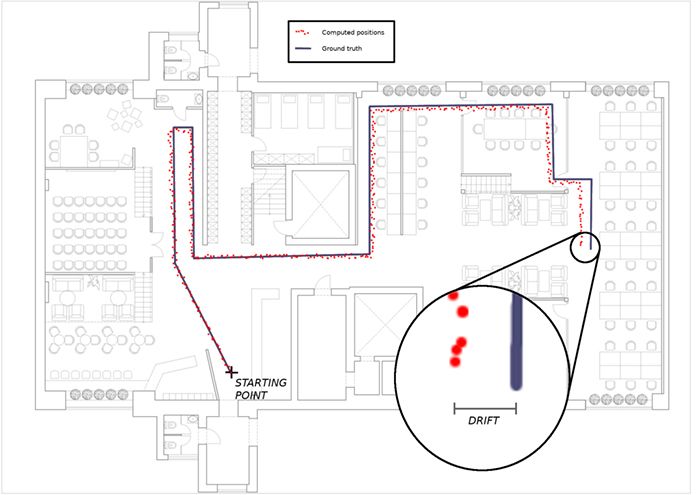
Drift
The “drift” is the location error accumulated over time during the simultaneous navigation and mapping of unknown environments (which are venues where Dragonfly has not been used before, and thus still no existing 3D map. For example, the first time a forklift that makes use of Dragonfly is driven inside a warehouse). The drift can be expressed as a percentage:
- When using stereoscopic cameras the drift has been verified to range between 0.6% and 1.3%. This means that if you drive a forklift with Dragonfly installed on board along a 100 meters linear path, at the end Dragonfly will report a location with a ROC of 60-130 cm (the location could be 60-130 cm away from the real location of the forklift).
- When using monocular cameras the drift in itself can be pretty high. The drift is high enough to NOT recommend relying on the location provided by Dragonfly engine in an un-mapped venue after 1 minute of navigation. This is why when Dragonfly is used with a monocular camera in an unknown environment, it is mandatory to perform a pre-mapping of the entire environment with frequent loop closures (see below). After pre-mapping the venue, the ROC is usually 1% of the distance of the camera from the closest real-world reference (visual or virtual markers).
Loop closures
The drift of Dragonfly when used with monocular cameras (and also with stereoscopic cameras) is automatically corrected by Dragonfly each time there is a loop-closure.
A loop-closure is triggered each time the camera is moved from an area already mapped to an unknown area, and then back to an area already mapped. When this happens, Dragonfly corrects the location and the map is also updated. Loop-closures are the key to get the maximum accuracy when Dragonfly is used with monocular cameras.
It is strongly recommended to perform frequent loop-closures during the initial mapping, for both monocular and stereo cameras installations.