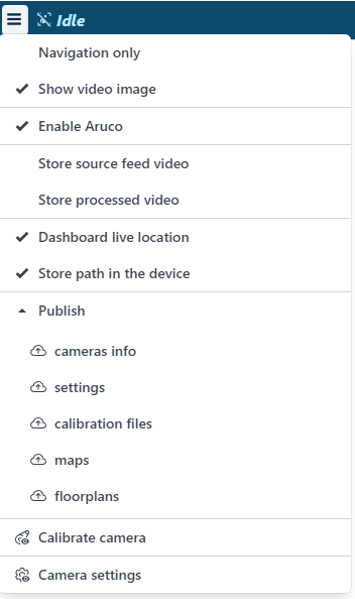
Inside the top central area of the Dragonfly Web UI it is possible to find a menu with several configuration parameters:
- Navigation only – this item should be un-checked during the mapping process and should be checked during the geo-referencing process and during the usage of Dragonfly in production.
- Show video image – allows to hide and show the video preview.
- Enable ArUco – enables/disables the usage of fiducial panels used to maximize the robustness of the SLAM.
- Store source feed video – allows to store the raw video files. These video files can be used during a post-processing activity to create new 3D maps with different FOV/algorithm parameters for testing purposes.
- Store processed video – allows to store the video file normalized and processed by Dragonfly. You can leave this option un-checked.
- Enable temporal mapping – this feature allows Dragonfly to navigate within unexplored areas (areas with features that are not included in the 3D map file) without getting LOST. Shown only when the “Navigation only” is checked!
- Dashboard live location – enables the view of live location inside the cloud dashboard. An Internet connection is required to send position data to the Dragonfly Cloud Server.
- Store path in device–enables the storage of the location data locally.
- Publish – allows to push the local data to the Dragonfly Cloud Server in order to share settings, calibration files, maps, floor plans with other Dragonfly instances (e.g., a fleet of forklifts).
- Calibrate camera – performs the calibration process of the camera. This is a process that needs to be done once for each camera. It allows to create a calibration file that encodes the intrinsic parameters of the camera like focal length, principal point, lens distortion. The calibration file is used by Dragonfly to “normalize” the images collected by wide-angle cameras.
- Camera settings – performs the setup of the video feed source.
|
 |