Yes, Dragonfly provides the pitch, yaw and roll of the camera according the aeronautic convention, thus providing the orientation of the device on which the camera is mounted on.
The orientation can be seen inside the Dragonfly App as:
- a 3D animated drone when the Calibration method parameter is set to “No markers used (direct view only, no WGS84 coordinates possible).“
- a 2D compass-like icon when the Calibration method parameter is set to “Three markers used (either printed or virtual)” and the floor plan has been geo-referenced.
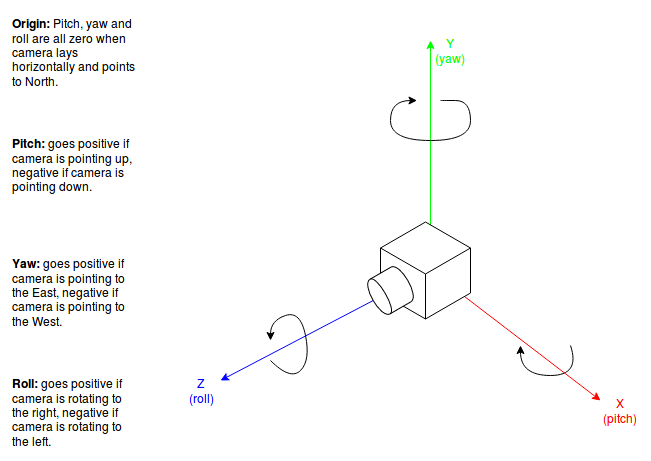
Please find here the definition and convention of the orientation angles provided by the Dragonfly engine:
Additional info about the YAW rotations
When the YAW value gets close to 90/-90°, the PITCH and ROLL values diverge a bit. This is due to the conversion from rotation matrix to Euler angles which includes an
When the YAW value gets close to 90/-90°, the PITCH and ROLL values diverge a bit. This is due to the conversion from rotation matrix to Euler angles which includes an
atan2(a,b) operation at some points, which is equivalent to an atan(a/b) and which “goes crazy” whenb is getting close to 0 (when YAW is close to 90/-90°).
- If you are interested in the exact angles then inside the Dragonfly CSV files (or using the Dragonfly “GET STATUS” API) you will be able to find the rotation matrix (which is super easy to compute but more complex to read for a human being).
- At this link you can find a tool to visualize how the rotation matrix changes as the Eular angles changes.